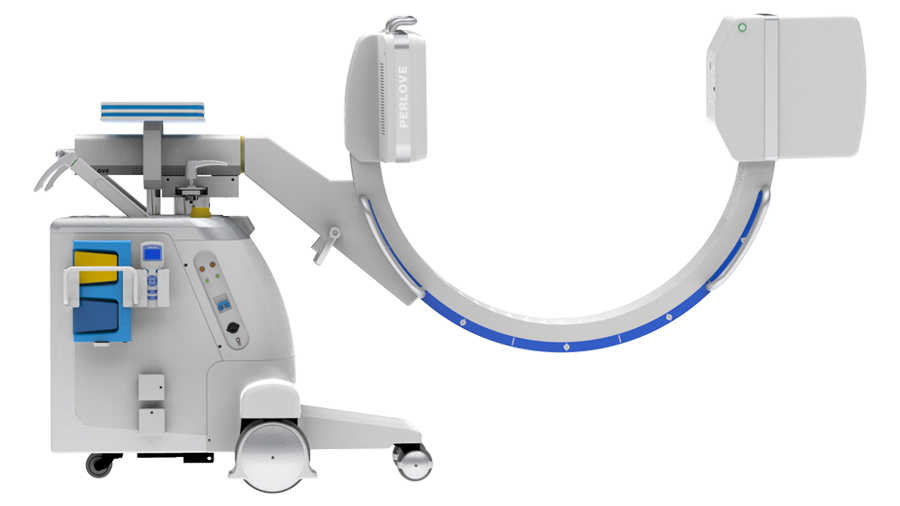
无线连接 灵活移动
分体式 移动式平板C形臂X射线机
手术导航定位系统
PL300B
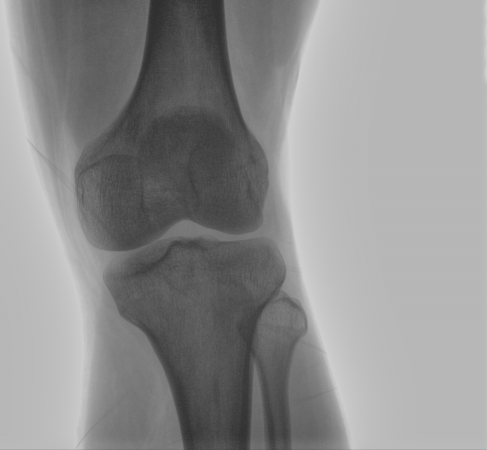
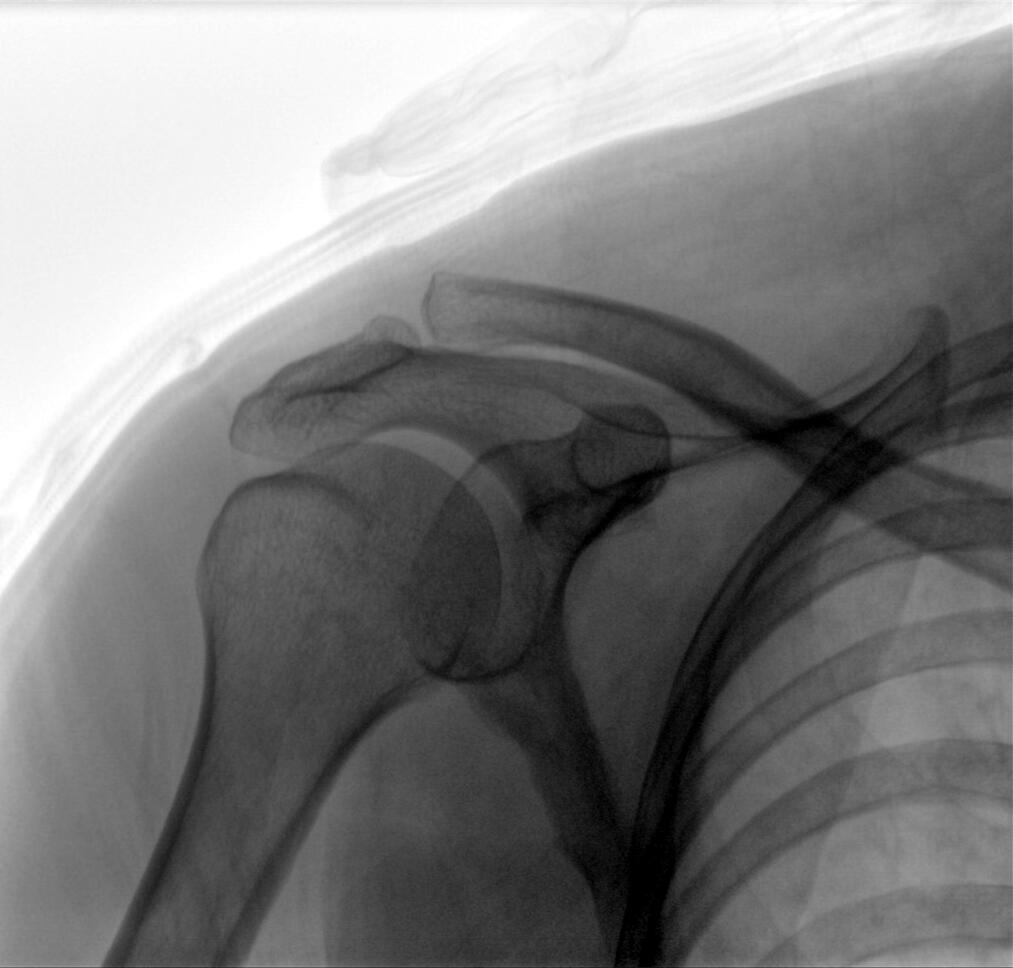
配备了两种平板尺寸,大尺寸动态平板探测器成像面积较传统平板探测器提升了25%以上,在视野需求大的手术中,便于医生更好定位病灶点,规划手术方案,减少因视野范围不足而多次透视、点片造成的不便,不仅提高了手术效率,也减少了辐射剂量。
注册证编号:苏械注准20222061158
广告批准文号:苏械广审(文)第270515-18911号